Es war mal wieder Bastelkeller Zeit!
Irgendwo im hintersten Eck habe ich noch einen Roboter des Typs Arexx AAR-04 ausgegraben. Dieser hat zwar durch auslaufende Batterien schon einen Säureschaden abbekommen, funktioniert aber immer noch 🙂

Mit dem dazugehörigen Schaltplan ist das Programmieren zumindest technisch gesehen schonmal kein Problem mehr:
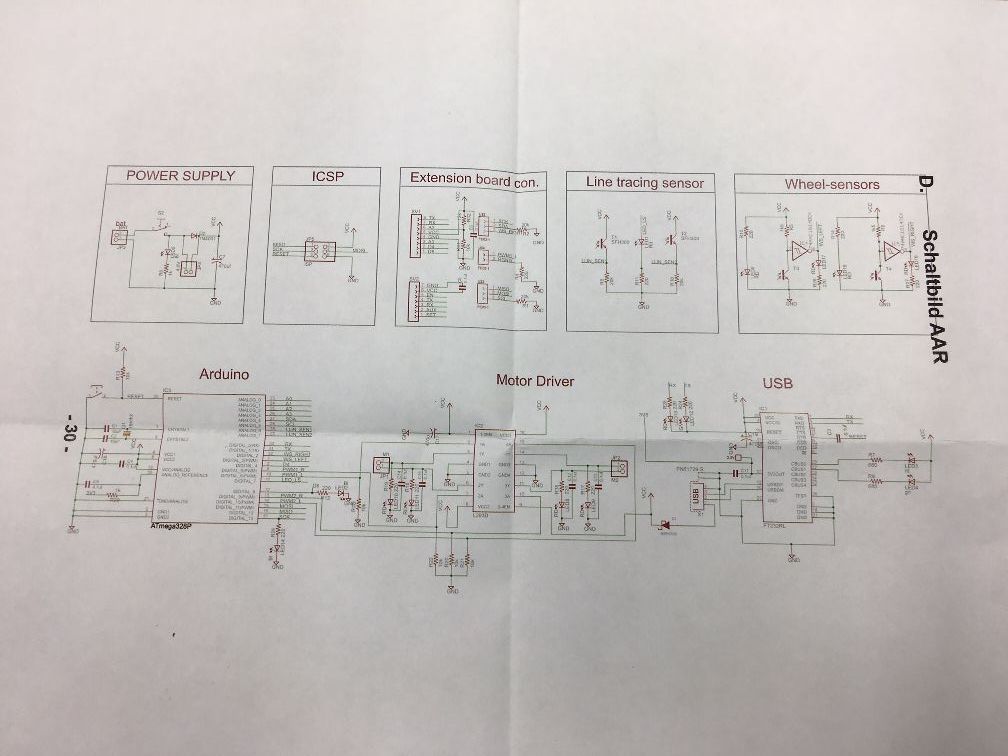
Der Roboter lässt sich direkt in der Arduino IDE über USB programmieren (ein Arduino Bootloader ist schon auf dem Atmega328P drauf). Außerdem besitzt er einen L293D Motortreiber sowie einen FT232RL USB to Seriell Wandler.
Dazu gibt es eine LED mit zwei Fototransistoren am Kopf zum folgen einer Linie, eine frei ansteuerbare LED, zwei Lichtschranken zum Messen der Motorgeschwindigkeit sowie natürlich die Motoren. Betrieben wird er entweder über USB (was zu wenig Strom für die Motoren liefert) oder über 4 AAA Batterien.
Als erstes sollte der Roboter:
a) Eine Linie suchen, und
b) dieser folgen.
So einfach es klingt, so kompliziert war es dann doch, denn die Helligkeit, die die Fototransistoren messen hängt natürlich nicht nur vom Untergrund ab, sondern auch von der Umgebungshelligkeit. Trotz bester Planung mit dem neuen Whiteboard
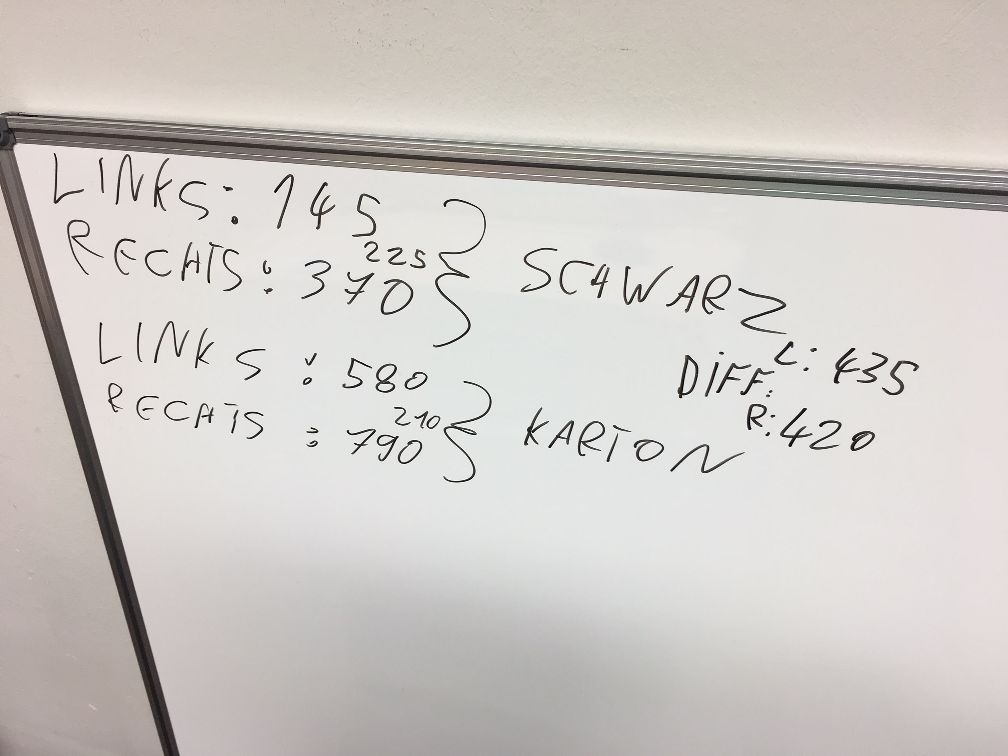
war der Programmcode nicht auf Anhieb fertig. Zwar folgte er manchmal der Linie. Manchmal aber auch nicht. Und manchmal drehte er sich einfach nur im Kreis….
Wenn das mal funktioniert dann soll der Roboter natürlich noch WLAN bekommen (hierfür steht ein ESP8266 Chip in den Startlöchern, der aber mit 3.3 Volt angesprochen werden will, deshalb muss hier noch ein Spannungsteiler und Spannungsregler dazu) und zusätzlich soll noch ein Ultraschall-Abstandssensor mit drauf kommen.
Abseits der Roboterprogrammierung rauchten auch die Köpfe beim Konfigurieren von automatisierten Erinnerungen basierend auf Taskwarrior-Aufgaben und beim Server-Upgrade von Debian Jessie auf Stretch wobei mit Erschrecken festgestellt wurde, dass Puppet dort in Version 4 vorhanden ist und sich doch das ein oder andere geändert hat.